What is iMS?
iMS is a robot calibration system developed in Germany and used by manufacturers across Europe. It measures and restores robot TCP, joint parameters, base, and user frames to their exact previous state after any physical disturbance — crashes, tool changeovers, component replacement, maintenance interventions, or robot swaps.
Unlike re-teaching or OEM service calls, iMS is an inline process that any operator can run without specialist training. The result is consistent, verified robot repeatability — every time.
When You Need iMS
After a Crash or Collision
Restore exact pre-crash joint parameters without re-teaching or waiting for OEM support
After Tool or End-Effector Changes
Verify and restore TCP accuracy after every tool swap — in minutes, not hours
After Maintenance or Component Replacement
Get back to verified accuracy after any mechanical intervention on the robot
Robot Replacement or Cloning
Transfer exact joint parameters from one robot to another instantly — no re-teaching from scratch
Key Advantages
Exact State Restoration
Returns robot to its precise pre-disturbance parameters — not an approximation
Inline Process
Calibration happens on the line, no separate station needed
No Specialist Required
Any operator can run iMS — no OEM technician or calibration expert needed
Proven in Automotive
Used by automotive Tier 1 suppliers across Europe including at Magna International facilities
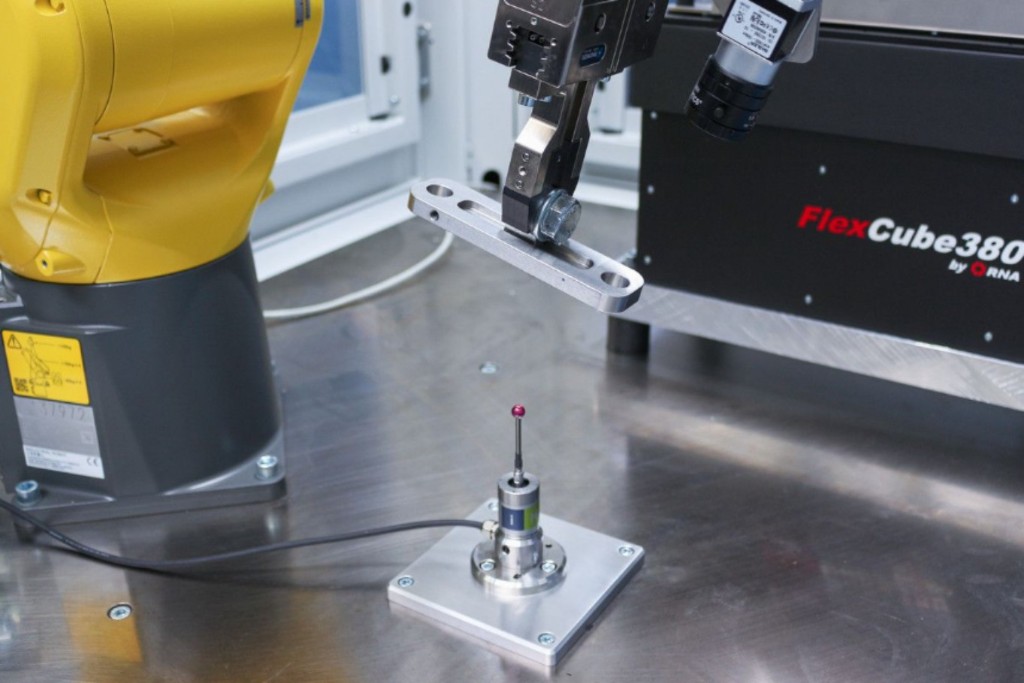
See It In Action
iMS Robot Calibration in Action
iMS Calibration Process
iMS — Restore Robot Precision
Who It's For
- Automotive Tier 1 suppliers with robot cells
- Aerospace and composite manufacturers
- Any plant running industrial robots where downtime costs matter